Bibliometric analysis
This study conducted a systematic analysis of global research trends in the field of RASS using bibliometric methods, combined with visualization tools such as CiteSpace and VOSviewer. Through the quantitative and visual mining of 399 relevant literatures, it not only revealed the development context, collaborative networks, and academic influence of this field, but also identified research hotspots and future directions.
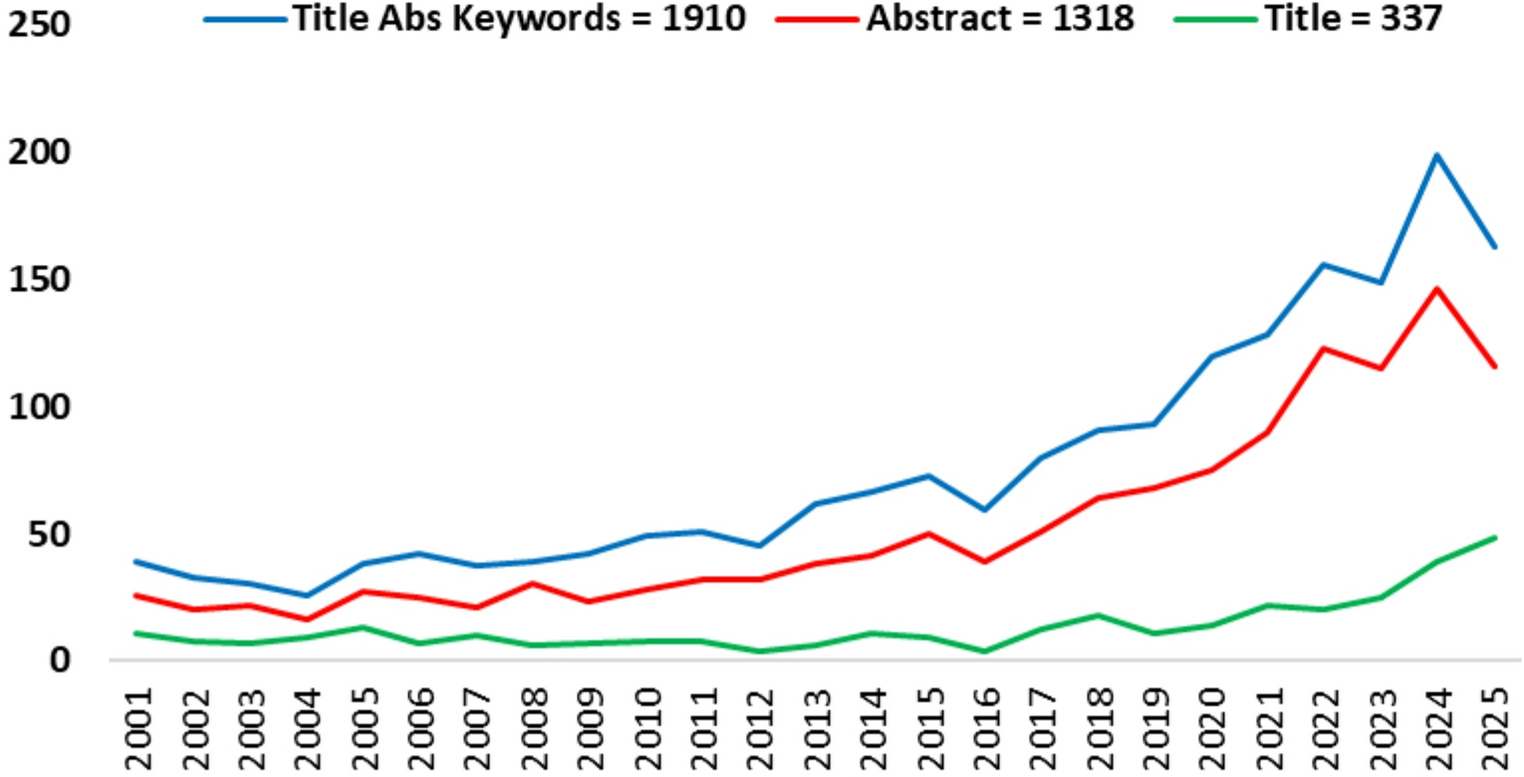
The results of the bibliometric analysis show that the first article in the field of RASS was published in 1997. Professor Abdel-Malek, K proposed a registration method for identifying the geometric shape of bones using robotic arms [19]. Although this method is generally applicable to many orthopedic internal fixation surgeries, it was only used for inserting pedicle screws into vertebral bodies for spinal fixation—laying a theoretical foundation for robot-assisted spine surgery. Since 1997, the field has undergone an evolution from infancy to rapid development. The trend of annual publication output indicates that research in this field was in the initial exploration stage before 2017, with a small number of publications. After 2017, however, the average annual number of publications reached 38.7, and hit a peak of 53 articles in 2022—reflecting that this field has attracted increasing attention from researchers worldwide. This growth trend aligns with the ongoing clinical translation of artificial intelligence and robotic technologies, and mirrors the increasing demand for precision and minimally invasive approaches in spine surgery.
From the perspective of national distribution, the United States and China occupy a dominant position in terms of publication output, contributing 163 and 126 articles respectively, and have become the main research forces in this field. However, European countries such as Germany and Switzerland perform prominently in terms of average citation frequency and centrality index, indicating that they exert significant influence in research quality and international cooperation. In particular, the United States, with a centrality score of 1.02, has become the hub of the global collaborative network, promoting academic exchanges and technology sharing among multiple countries. Among these contributions, the United States has even advanced spine surgery toward radiation-free robotic spine surgery [20,21,22].
The institutional collaborative network further shows that Beijing Jishuitan Hospital leads in both publication output and collaboration intensity. Among its contributions, Professor Li, Meng from Beijing Jishuitan Hospital published a high-impact factor article in IEEE Transactions on Automation Science and Engineering, proposing a new method to improve stability and safety for robot-assisted spine surgery [23], thereby further advancing the development of this field. In addition, intercontinental collaborative clusters (such as linkages between institutions in Europe and Asia) reflect the international and diverse characteristics of research in this field.
Analysis of authors reveals that the most productive authors are mainly concentrated in the United States and China. Among these authors, Tian, Wei ranks first with 20 publications, while Theodore, N has the highest H-index—reflecting his more prominent influence in the academic community. From the perspective of journals, medium-to-high impact journals such as World Neurosurgery and Spine have become important media for knowledge dissemination in this field. In particular, Spine, with its high citation count, highlights its authoritative status in clinical research on spine surgery. Analysis from the reference perspective shows that the paper Clinical Acceptance and Accuracy Assessment of Spinal Implants Guided With SpineAssist Surgical Robot: Retrospective Study published by DeVito, D.P. has the most citations. This fully demonstrates the far-reaching influence of this reference in the field of robot-assisted spine surgery. Overall, various bibliometric indicators not only depict the scale and structure of this research field but also provide solid data support for identifying core research forces and high-impact achievements.
Research hotspots and future trends
To contextualize the development trajectory of RASS, comparing its adoption with that of robotics in other surgical specialties—such as urology—offers valuable context. Robotic-assisted radical prostatectomy, primarily propelled by the da Vinci system, achieved widespread clinical uptake relatively rapidly, owing to its distinct advantages in operating within confined spaces [24,25,26]. In contrast, the progression of RASS has been more incremental: its early focus centered on demonstrating the accuracy and safety of discrete procedural steps—most notably pedicle screw placement—rather than overhauling entire open procedures outright. his measured pace likely reflects the critical importance of spinal stability, the proximity to neural structures, and the heightened stakes of procedural error. Our analysis of research trends—marked by a strong, sustained emphasis on “accuracy” and “feasibility”—mirrors this deliberate, evidence-based strategy for integrating RASS into clinical practice.
Keyword co-occurrence, clustering, and burst analyses are effective methods to reveal research hotspots and trends. Through keyword analysis in this study, it was found that the research hotspots of RASS are highly concentrated around the logical chain of “technical methods – surgical operations – clinical effects”. Specifically, “accuracy” (with a frequency of 196 occurrences) is the core keyword, and it is closely co-occurring with high-frequency words such as “navigation”, “pedicle screw placement”, and “robot assistance”, indicating that the accuracy of pedicle screw placement is a research hotspot in this field. The co-occurrence of these keywords not only demonstrates the core focus of current research but also reveals the close connection between technological progress and clinical practice, providing strong support for further exploration and development. In recent years, significant progress has been made in the effectiveness and safety of robot-assisted spine surgery, and this conclusion has been confirmed in multiple studies. For example, a multicenter study compared robot-assisted and navigation-guided minimally invasive transforaminal lumbar interbody fusion, and the results showed that robot-assisted surgery exhibited excellent performance in terms of accuracy in screw placement and postoperative recovery [27]. In addition, a systematic review and meta-analysis also evaluated the accuracy and clinical characteristics of robot-assisted cervical spine surgery, finding that it has obvious advantages in reducing surgical errors and improving patient satisfaction [28]. With the continuous innovation of technology and the deepening of clinical practice, the application of robotic systems in spine surgery has become increasingly reliable. A large number of clinical trials and actual surgical cases have shown that robotic technology can significantly improve surgical precision and effectively reduce the incidence of complications, thereby bringing better treatment effects and rehabilitation experiences to patients [21, 29,30,31,32,33]. This not only means that patients can bear lower risks during surgery but also that they can expect shorter recovery times and better surgical outcomes. Overall, these findings indicate that robot-assisted spine surgery will become the preferred treatment method for more patients in the future and bring revolutionary changes to the field of spine surgery.
Timeline view analysis further subdivides research topics into eight cluster themes, reflecting an evolutionary path from the exploration of technical feasibility to mid-term clinical validation and finally to technical integration. It also reflects that current research hotspots include robot-assisted surgery, learning curves, and radiation exposure, which embodies the industry’s demands for precise, safe, and efficient surgeries. Spinal robots have been used clinically for two decades and are currently primarily employed in pedicle screw placement, which can significantly improve the accuracy of screw insertion [34]. Additionally, robot-assisted spine surgery can effectively reduce radiation exposure for both patients and surgeons. With the continuous advancement of technology, the radiation-free technology of spinal robots has become increasingly mature. The team led by Altorfer, F. C. S. successfully applied MRI sequences ZTE and SPGR for the first time to registration in robotic spine surgery for intraoperative navigation of lumbar pedicle screws, achieving sufficient accuracy and demonstrating the potential progress of radiation-free spine surgery [22]. As radiation-free technologies such as MRI navigation mature, combined with robots’ capabilities in real-time image segmentation, automatic anatomical structure recognition, and path planning, The integration of emerging radiation-free navigation technologies, such as MRI-based registration, with robotic systems presents a promising pathway toward achieving a future surgical paradigm characterized by minimal radiation exposure and enhanced intraoperative guidance.
Keyword Burst Analysis further reveals the dynamic evolution of research hotspots. The early keyword “pedicle screw” (1997–2013) indicates that during this period, robot-assisted spine surgery was mainly applied to pedicle screw placement. “Computer-assisted surgery” (starting from 2010) signifies the transition of this field from the initial integration stage of anatomical foundations and digital technology to a new robot-dominated phase. In recent years, the continuous emergence of keywords such as “robot-assisted spine surgery” and “robotic-assisted surgery” (extending to 2025) indicates that robot-assisted technology has become the most dynamic cutting-edge direction at present. Studies have shown that MazorX (Mazor), TiRobot (TINAVI), and Renaissance (Mazor) have become leaders in the field of spinal robotic surgery, each making outstanding contributions to improving surgical efficacy through innovative technologies [35]. Evidence suggests that TiRobot has advantages in the accuracy of spinal pedicle screw placement [36, 37]. Notably, “feasibility” (with a burst strength of 4.08, 2023–2025), as an emerging burst keyword, highlights that clinical feasibility and technology acceptance have become the focus of current research. Challenges such as long surgical time, complications, high costs, and the need for specialized training still exist [38,39,40].
Alongside accuracy, the safety profile and complication rates of RASS are a critical area of investigation. While our keyword analysis did not identify ‘complication’ as a top-frequency term, it is an implicit and essential component of assessing ‘feasibility’ and ‘clinical outcomes’. Several studies in our corpus have addressed this. For example, a systematic review included in our analysis evaluated adverse events and found that robotic assistance could potentially reduce certain complications associated with malplaced screws, such as neurologic deficits or vascular injuries [3]. However, the literature also notes a learning curve associated with RASS, during which complication rates may be higher, underscoring the need for specialized training [41, 42]. Future research should include standardized reporting of complications to allow for more robust meta-analyses and a clearer understanding of the risk-benefit ratio.
In summary, this bibliometric analysis delineates the intellectual structure and evolutionary trajectory of the RASS field. The most significant insights include the dominant contributions from the United States and China in terms of publication volume, and the influential role of European nations like Germany in research quality and international collaboration. The research focus has consistently centered on enhancing the accuracy of pedicle screw placement, forming a coherent “technical methods–surgical operation–clinical outcomes” logical chain. The evolutionary pathway has transitioned from foundational technical exploration to clinical validation and is now entering a phase of integration and advancement, marked by the emergence of themes such as artificial intelligence and radiation-free surgery. Looking ahead, these bibliometric findings underscore the necessity for strengthened global and interdisciplinary cooperation. Future efforts should prioritize the deep integration of AI into surgical planning, validate the clinical feasibility and cost-effectiveness of emerging technologies, and establish robust long-term outcome databases. Such collaborative endeavors will be crucial in addressing existing challenges and steering the field toward higher-level, clinically impactful development.
Research limitations
This study has several limitations. First, the exclusive reliance on the Web of Science Core Collection may introduce selection bias. WOS’s strong coverage of English-language journals may underrepresent significant research published in other languages, particularly from regions like East Asia where RASS is rapidly advancing. This could have skewed our geographical distribution analysis, potentially undervaluing the contributions of certain countries or institutions. Furthermore, compared to multidisciplinary databases like Scopus or medically focused ones like PubMed, WOS might have lesser coverage in engineering literature related to robotic hardware development. This might cause a lag in identifying the very latest technological trends, as pioneering engineering feats are often first presented in conference proceedings, a form of grey literature not comprehensively indexed in WOS. Future bibliometric studies would benefit from a multi-database approach to construct a more holistic and timely view of the field.



Comments (0)